Scientists have been trying to build snake-like, limbless robots for decades. These robots can be useful in search and rescue situations, where they can navigate collapsed buildings to find and assist survivors.
Limbless robots with thin, flexible bodies can easily navigate confined and complex spaces, such as debris fields, where walking or wheeled robots and human rescuers tend to fail.
But even the most advanced limbless robots haven’t come close to moving through difficult terrain with the agility and versatility of worms and snakes. Even tiny nematode worms Caenorhabditis elegansHaving a relatively simple nervous system, humans can navigate challenging physical environments.
As part of a team of roboticists and physicists, we wanted to investigate this difference in performance. But instead of looking to neuroscience for the answer, we turned to biomechanics.
We set out to create a robot model that moves its body using a mechanism similar to how worms and snakes power their movements.
Ripples and mechanical intelligence
Over thousands of years, organisms have developed complex nervous systems that allow them to sense their physical environment, process this information, and perform precise body movements to navigate around obstacles.
In the field of robotics, engineers design algorithms that receive information from sensors in the robot’s body (a type of robotic nervous system) and use this information to decide how to move. These algorithms and systems are often complex.
Our team wanted to find a way to simplify these systems by emphasizing mechanically controlled approaches to dealing with obstacles that do not require sensors or computation. To do this, we turned to examples from biology.
Animals do not rely solely on their neurons (brain cells and peripheral nerves) to control movement. They also use physical characteristics of their bodies (e.g. the flexibility of their muscles) to help them spontaneously respond to their environment, before the neurons even have a chance to respond.
While computational systems are governed by the laws of mathematics, mechanical systems are governed by physics. To accomplish the same task, scientists can either design an algorithm or carefully design a physical system.
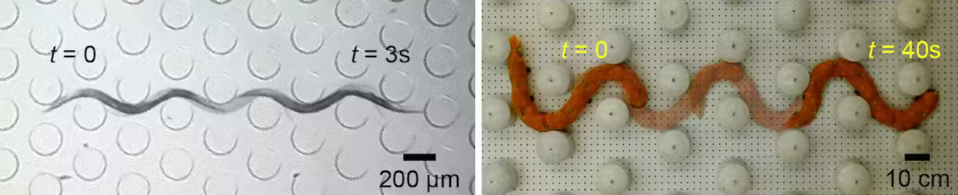
For example, limbless robots and animals move around the world by bending parts of their bodies left and right, a type of movement called undulation. When they hit an obstacle, they have to turn around and lean more to one side.
Scientists can achieve this by attaching sensors to a robot’s head or body. They can then design an algorithm that tells the robot to turn back or go around the obstacle when a large enough force is “felt” in its head or body.
Alternatively, scientists can carefully choose the robot’s materials and the layout and power of its motors so that collisions can create a body shape that leads to spontaneous rotation. This robot will have what scientists call “mechanical intelligence.”
If scientists like us can understand how organisms’ bodies mechanically respond to contact with objects in their environment, we can design better robots that can deal with obstacles without having to program complex algorithms.
If you compare a diverse set of wavy organisms with a growing menagerie of robotic “snakes,” one difference between robots and biological undulators stands out. Nearly all wavy robots bend their bodies using a series of connected parts with motors at each joint. But living organisms do not bend this way.
In contrast, all limbless organisms, from large snakes to microscopic nematodes, perform bending not through a single rotary joint-motor system, but through two muscle bands on each side of the body. To an engineer, this design seems counterintuitive. Why control something with two muscles or motors when you can do the same thing?
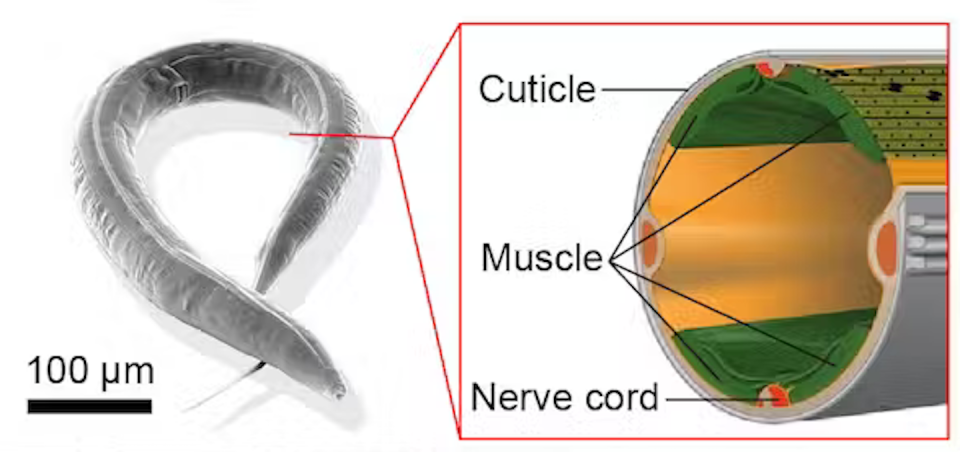
To get to the bottom of this problem, our team built a new mechanically intelligent limbless robot called MILLR, inspired by two bands of muscle on snakes and worms. MILLR has two independently controlled cables that pull each joint bilaterally left and right.